

TDOA- en TWR-positioneringsprotocollen uitgelegd
Dit artikel maakt deel uit van de Pozyx Academy en is het derde in een reeks van vijf artikelen waarin wordt uitgelegd hoe de Pozyx-technologie werkt en waar moet je rekening mee houden bij de installatie van het Pozyx-systeem.
- Hoe positionering werkt
- Hoe ultrabreedband werkt
- TDOA en TWR Positioneringsprotocollen uitgelegd
- Ultrabreedband en obstakels
- Waar plaats je de ankers
Op dit moment biedt Pozyx twee positioneringsprotocollen: TDOA en TWR. Elk protocol heeft zijn voor- en nadelen en is beter geschikt, afhankelijk van de toepassing. Aan het einde van het artikel worden de protocollen vergeleken in één tabel.
Tijdsverschil van aankomst (TDOA)
In de TDOA-modus verzenden tags periodiek een UWB (ultrabreedband) pakketje, met of zonder enige planning of rekening met andere tags of ankers. Omdat de tag slechts één UWB-transmissie moet verzenden, kan de positionering snel en met een laag vermogen plaatsvinden. Met het veelgebruikte Aloha-protocol, moeten tags enkel zenden en nooit ontvangen, wat resulteert in een ongelooflijk laag stroomverbruik en een levensduur van de batterij van meerdere jaren. Om de interferentie met andere tags te beperken, is de updatesnelheid echter enigszins beperkt. Als alternatief kunnen de tags worden gepland, zoals in TWR+, om een nog hogere updatesnelheid te bereiken.

Wanneer een tag in de TDOA-modus een bericht verzend " Hallo, mijn ID is xxxx ", dan zal dit worden ontvangen dooralle ankers binnen bereik. Via een lokaal netwerk sturen deze ankers het exacte tijdstip waarop ze de puls van de tag hebben ontvangen, naar de positioneringsserver. Omdat de ankers zich op verschillende afstanden van de tag bevinden, hebben deze ankers de puls van de tag op iets andere tijdstippen ontvangen. Op basis van deze tijdsverschillen kan de server vervolgens berekenen waar de tag zich bevond ten opzichte van de ankers, op het moment dat de tag het pakketje verstuurde.
Geometrisch gezien zal de positie zich op het snijpunt van hyperbolen bevinden, bepaald door de gemeten tijdsverschillen.
Opmerking: In TDOA zal de tag nooit zijn positie kennen, tenzij deze naar de tag wordt teruggekoppeld, wat meestal niet gebeurt.
Opdate het tijdsverschil op de ankers gemeten kan worden, moeten de ankers moet hetzelfde besef van tijd hebben. Om dit te bereiken, moeten hun klokken nauwkeurig worden gesynchroniseerd. Daarom zullen de ankers periodiek met elkaar communiceren via UWB om hun klokken te synchroniseren. Zelfs met de synchronisatie hebben ankers nog steeds zeer nauwkeurige klokken nodig om TDOA mogelijk te maken, die alleen beschikbaar zijn op de Pozyx ankers.
Rechtstreekse afstandsbepaling (TWR)
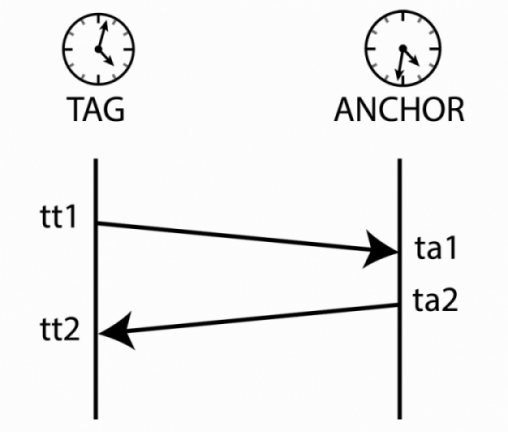
Bij TWR wordt de afstand van een tag tot het anker rechtstreeks verkregen door een pakket heen en weer te sturen. Door te meten hoe lang het duurde voordat het pakket terugkwam, kan de tag de afstand tot het anker inschatten. Voor de positionering initieert de tag de communicatie met de ankers en zal het de afstandsmeting uitvoeren, één voor één. Zodra de tag een bereik heeft van ten minste drie, idealiter vier ankers, kan deze zijn positie berekenen door middel van trilateratie. Geometrisch gezien bevindt de tag zich op het snijpunt van cirkels die worden gedefinieerd door de gemeten bereiken.
TWR was de eerste oplossing die we aanboden met ons Pozyx Creator-systeem. Als er meerdere tags moeten worden gepositioneerd, wordt de ene tag de master gemaakt en de andere de slaves. De mastertag instrueert de slave tags om zichzelf één voor één ten opzichte van de ankers te positioneren en hun positie terug te melden. Meestal wordt de mastertag dan verbonden met een computer, Arduino of Raspberry Pi, die op zijn beurt de posities van alle slave-tags via de master verkrijgt. Zo werkt onze cloud-app ook voor de Creator-systeem.
Deze aanpak, met een enkele mastertag, is niet goed schaalbaar naar grote gebieden, aangezien alle andere tags zich binnen het radiobereik van de mastertag moeten bevinden. Om schaalbare TWR te bereiken, ook wel TWR+ genoemd, wordt de functie van de mastertag vervangen door het netwerk van ankers, die dynamisch plannen welke tag moet worden gepositioneerd. TWR+ wordt geïmplementeerd op het Pozyx Enterprise-systeem, waarbij het schema op de centrale server wordt berekend en naar de ankers wordt gedistribueerd. Wat TWR+ onderscheidt, is dat de positioneringsserver ook alle posities van de tags in realtime kent. Hierdoor kan de server, via de ankers, tags efficiënt plannen en ze alleen de ankers toewijzen die het dichtstbij/het gemakkelijkst te bereiken zijn. Dit wordt gewoonlijk „slimme planning” en „slimme ankerselectie” genoemd. Beide methoden helpen de updatesnelheid van tags te verhogen, omdat ze niet hoeven te wachten op andere tags of ankers die toch buiten het bereik liggen. Tags gebruiken alleen de ankers die zich het dichtst bij hen bevinden en wachten alleen om interferentie met de tags te voorkomen die zo dichtbij zijn dat ze gestoord kunnen worden.
Omdat er geen mastertag is, kan TWR+ onbeperkt worden geschaald in zowel het aantal tags als ankers.
Vergelijkingstabel
Dus laten we alles samenvoegen. Natuurlijk hangt veel af van de daadwerkelijke implementatie, aangezien er geen standaardimplementatie bestaat voor deze protocollen.
*De theoretische maximale totale updatesnelheid wordt berekend op basis van een aantal aannames: de kortste UWB-pakketten (wat resulteert in het kleinste bereik), geen bewakingstijden, 4 gebruikte ankers en instant computing. Dit is niet erg realistisch. Het geeft echter wel een duidelijke indicatie welk protocol het voordeel heeft. Houd er rekening mee dat deze maximale updatesnelheid gedeeld moet worden tussen alle tags binnen een radiocel (ongeveer 1000 m²). Dus met 100 tags in Aloha TDOA-modus zou de theoretische maximale updatesnelheid voor elke tag ongeveer 13 Hz zijn.
Uit de vergelijking zien we dat TDOA het voordeel heeft bij grootschalige toepassingen met een laag stroomverbruik, zoals het volgen van activa. Evenzo heeft TDOA in toepassingen die zeer hoge updatesnelheden vereisen, zoals in competitieve sporten, een voordeel. In andere toepassingen, zoals ad-hoc, niet-permanente toepassingen, kan TWR geschikter zijn. TWR zou ook een voorkeurskeuze zijn voor toepassingen waarbij de tags zich buiten het ankergebied zouden bevinden.
In termen van nauwkeurigheid bieden beide protocollen een vergelijkbare horizontale nauwkeurigheid binnen het gebied van de ankers. Buiten het ankergebied zal de nauwkeurigheid voor TDOA veel sneller afnemen in vergelijking met TWR. Voor 3D-positionering kunnen beide protocollen de hoogte nauwkeurig inschatten, maar dit hangt sterk af van de plaatsing van het anker. Over het algemeen zal TDOA, als er alleen ankers aan het plafond zijn gemonteerd, erg slecht zijn in het inschatten van de hoogte. Dit is minder het geval voor TWR, dat nog steeds een relatief nauwkeurig resultaat kan opleveren.
Lees het volgende artikel over ultrabreedband en obstakels om meer te weten te komen over Pozyx's technologie.